前言
成为一名优秀的Android开发,需要一份完备的知识体系,在这里,让我们一起成长为自己所想的那样~。
众所周知,Android核心源码这一块的知识一直是阻碍广大Android开发者成为高级甚至资深Android的拦路虎,因此,从这篇开始,笔者接下来将会陪大家深入分析Android中的核心源码,从而能够让我们真正地去理解Android源码背后的设计思想与艺术,真真切切地提升自己的内功。
Android系统启动流程共分为四篇,分别为:
- Android系统启动流程之init进程启动
- Android系统启动流程之Zygote进程启动
- Android系统启动流之SystemServer进程启动
- Android系统启动流程之Launcher进程启动
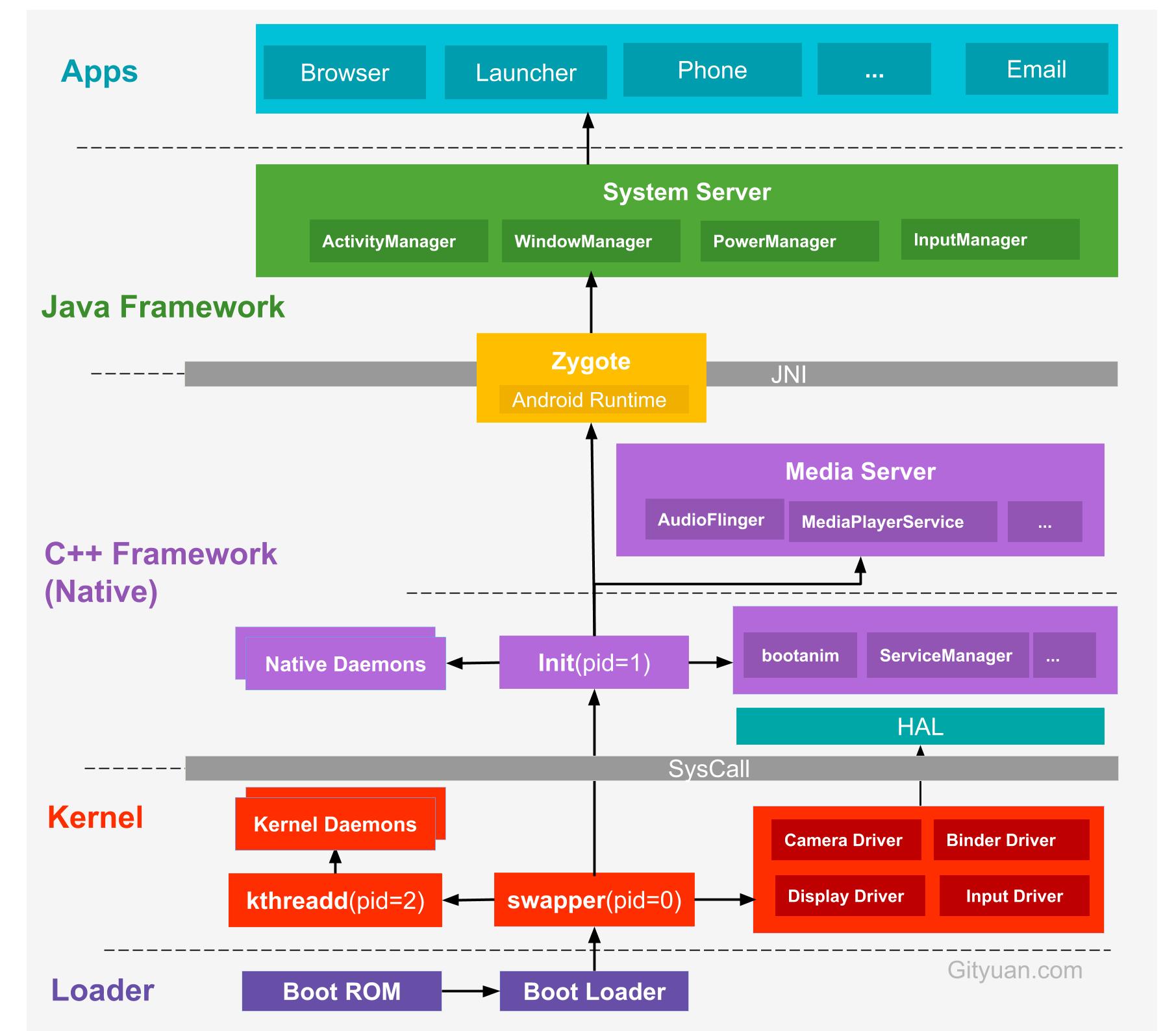
接下来,笔者将会为大家介绍Android系统启动流程的相关知识,但是由于篇幅太长,这里便打算分为四部分来进行讲解。这一篇,我将首先对其中最重要的init进程启动过程进行分析。这里,先给出一幅Gityuan博客中的一幅系统启动架构图来对Android系统的启动流程有一个宏观的把控。
下面,我们正式开始进行分析~
一、启动电源以及系统启动
当电源按下时引导芯片代码会从预定义的地方(固化在ROM)开始执行,加载引导程序BootLoader到RAM,然后执行。
二、引导程序BootLoader
它是Android操作系统开始运行前的一个小程序,主要将操作系统OS拉起来并进行。
三、Linux内核启动
当内核启动时,设置缓存、被保护存储器、计划列表、加载驱动。此外,还启动了Kernel的swapper进程(pid = 0)和kthreadd进程(pid = 2)。下面分别介绍下它们:
- swapper进程:又称为idle进程,系统初始化过程Kernel由无到有开创的第一个进程, 用于初始化进程管理、内存管理,加载Binder Driver、Display、Camera Driver等相关工作。
- kthreadd进程:Linux系统的内核进程,是所有内核进程的鼻祖,会创建内核工作线程kworkder,软中断线程ksoftirqd,thermal等内核守护进程。
当内核完成系统设置时,它首先在系统文件中寻找init.rc文件,并启动init进程。
四、init进程启动
init进程主要用来初始化和启动属性服务,并且启动Zygote进程。
1、init进程是什么?
Linux系统的用户进程,是所有用户进程的鼻祖,进程号为1,它有许多重要的职责,比如创建Zygote孵化器和属性服务等。并且它是由多个源文件组成的,对应源码目录system/core/init中。
2、init进程启动核心代码流程分析
init进程的启动会首先从init进程的入口函数开始,init进程的入口函数main位于system/core/init/init.cpp中,代码如下所示:
int main(int argc, char** argv) {
...
// 如果是初始化第一阶段,则需要执行下面的步骤1
if (is_first_stage) {
...
// 清理umask
umask(0);
...
// 1、创建和挂载启动所需的文件目录
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
#define MAKE_STR(x) __STRING(x)
mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC));
...
// 初识化Kernel的Log,获取外界的Kernel日志
InitKernelLogging(argv);
...
}
// 初识化Kernel的Log,获取外界的Kernel日志
InitKernelLogging(argv);
...
// 2、初始化属性相关资源
property_init();
...
// 创建epoll句柄
epoll_fd = epoll_createl(EPOLL_CLOEXEC);
...
// 3、设置子信号处理函数
sigchld_handler_init();
// 导入默认的环境变量
property_load_boot_defaults();
// 4、启动属性服务
start_property_service();
set_usb_controller();
...
// 加载引导脚本
LoadBootScripts(am, sm);
...
while (true) {
...
if (!(waiting_for_prop || Service::is_exec_service_running())) {
// 内部会偏离执行每个action中携带的command对应的执行函数
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
if (!shutting_down) {
// 重启死去的子进程
auto next_process_restart_time = RestartProcesses();
...
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout_ms = 0;
}
epoll_event ev;
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, epoll_timeout_ms));
if (nr == -1) {
PLOG(ERROR) << "epoll_wait failed";
} else if (nr == 1) {
((void (*)()) ev.data.ptr)();
}
}
return 0;
}
static void LoadBootScripts(ActionManager&action_manager, ServiceList& service_list) {
Parser parser = CreateParser(action_manager, service_list);
std::string bootscript = GetProperty("ro.boot.init_rc", "");
// bootscript默认是空的
if (bootscript.empty()) {
// 5、解析init.rc配置文件
parser.ParseConfig("/init.rc");
if (!parser.ParseConfig("/system/etc/init")) {
late_import_paths.emplace_back("/system/etc/init");
}
if (!parser.ParseConfig("/product/etc/init")) {
late_import_paths.emplace_back("/product/etc/init");
}
if (!parser.ParseConfig("/odm/etc/init")) {
late_import_paths.emplace_back("/odm/etc/init");
}
if (!parser.ParseConfig("/vendor/etc/init")) {
late_import_paths.emplace_back("/vendor/etc/init");
}
} else {
parser.ParseConfig(bootscript);
}
}
1、创建和挂载启动所需的文件目录
其中挂载了tmpsf、devpts、proc、sysfs和selinuxfs共5种文件系统(它们均是系统运行时目录):
mount(...);
mkdir(...);
...
2、对属性服务进行初始化
property_init();
什么是属性服务?
Windows平台上有一个注册表管理器,注册表的内容采用键值对的形式来记录用户、软件等使用信息。如果系统或软件重启,还是能够根据这份注册表中的记录,进行相应的初识化工作。Android也提供了一个这样类型的机制,即属性服务。
它具体是如何进行初始化的?
我们查看system/core/init/property_service.cpp源码中的property_init()函数:
void property_init() {
mkdir("/dev/__properties__", S_IRWXU | S_IXGRP S_IXOTH);
CreateSerializedPropertyInfo();
// 关注点
if (__system_property_area_init()) {
LOG(FATAL) << "Failed to initialize property area";
}
if (!property_info_area.LoadDefaultPath()) {
LOG(FATAL) << "Failed to load serialized property info file";
}
}
init进程启动时会启动属性服务,并为其分配内存,用来存储这些属性,如果需要就可以直接读取,具体在代码里就是执行了property_init()函数中的__system_property_area_init()函数去初始化属性内存区域。
3、设置子进程信号处理函数,如果子进程(zygote进程)异常退出,init进程会调用该函数中设定的信号处理函数来进行处理
sigchld_handler_init();
sigchld_handler_init()的作用:
防止init进程的子进程成为僵尸进程,为了防止僵尸进程的出现,系统会在子进程暂停和终止的时候发出SIGCJHLD信号,该函数就是用来接收SIGCHLD信号的,注意它仅处理进程终止的SIGCHLD信号。
僵尸进程是什么?
在UNIX/Linux中,父进程使用fork创建子进程,子进程终止后,如果父进程不知道子进程已经终止的话,这时子进程虽然已经退出,但是在系统进程表中还为它保留了一些信息(如进程号、运行时间、退出状态等),这个子进程就是所谓的僵尸进程。其中系统进程表是一项有限的资源,如果它被僵尸进程耗尽的话,系统可能会无法创建新的进程。
如果是Zygote进程终止了,则会如何?
sigchld_handler_init()函数内部会找到Zygote进程并移除所有的Zygote进程的信息,在重启Zygote服务的启动脚本(如init.zygote64.rc)中带有onrestart选项的服务。
4、启动属性服务(其中会启动servicemanager(binder服务大管家)、bootanim(开机动画)等重要服务)
start_property_service();
属性服务是如何启动的?
我们查看system/core/init/property_service.cpp源码中的start_property_service()函数:
void start_property_service() {
selinux_callback cb;
cb.func_audit = SelinuxAuditCallback;
selinux_set_callback(SELINUX_CB_AUDIT, cb);
property_set("ro.property_service.version", "2");
// 1
property_set_fd = CreateSocket(PROP_SERVICE_NAME, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK,
false, 0666, 0, 0, nullptr);
if (property_set_fd == -1) {
PLOG(FATAL) << "start_property_service socket creation failed";
}
// 2
listen(property_set_fd, 8);
// 3、4、5
register_epoll_handler(property_set_fd, handle_property_set_fd);
}
- 1、首先,创建非阻塞式的Socket,并返回property_set_fd文件描述符。
- 2、使用listen()函数去监听property_set_fd,此时Socket即成为属性服务端,并且它最多同时可为8个试图设置属性的用户提供服务。
- 3、使用epoll()来监听property_set_fd:当property_set_fd中有数据到来时,init进程将调用handle_property_set_fd()函数进行处理。在Andorid 8.0的源码中则在handle_property_set_fd()函数中添加了handle_property_set函数做进一步封装处理。
- 4、系统属性分为两种属性,即普通属性和控制属性。控制属性用来执行一些命令,比如开机的动画就使用了这种属性。在handle_property_set_fd()函数中会先判断如果属性名是以”ctl.”开头的,就说明是控制属性,如果客户端权限满足,则会调用handle_control_message()函数来修改控制属性。如果是普通属性,则会在客户端全面满足的条件下调用property_set函数来修改普通属性。
- 5、在property_set中会先从属性存储空间中查找该属性,如果有,则更新,否则添加该属性。此外,如果名称是以”ro”开头(表示只读,不能修改),直接返回,如果名称是以”persist.”开头,则写入持久化属性。
epoll是什么?
在Linux的新内核中,epoll是用来取代select/poll的,它是Linux内核为处理大批量文件描述符的改进版poll,是Linux下多路复用I/O接口select/poll的增强版,它能显著提升程序在大量并发连接中只有少量活跃的情况下的系统CPU利用率。
epoll和select的区别?
epoll内部用于保存事件的数据类型是红黑树,查找速度快,select采用的数组保存信息,查找速度很慢,只有当等待少量文件描述符时,epoll和select的效率才差不多。
5、解析init.rc配置文件
parser.ParseConfig("/init.rc");
init.rc是什么?
它是由Android初始化语言编写的一个非常重要的配置脚本文件。Android初始化语言主要包含5种类型的语句:
- Action(常用)
- Service(常用)
- Command
- Option
- Import
这里了解下Action和Service的格式:
on <trigger> [&& <trigger>]* //设置触发器
<command>
<command> //动作触发之后要执行的命令
...
service <name> <pathname> [ <argument> ]* //<service的名字><执行程序路径><传递参数>
<option> //option是service的修饰词,影响什么时候、如何启动services
<option>
...
注意:Android8.0对init.rc文件进行了拆分,每个服务对应一个rc文件。
init.rc中的Action、Service语句都有相应的XXXParser类来解析,即ActionParser、ServiceParser。那么ServiceParser是如何解析Service语句的?
查看相应的XXXparser,即ServiceParser:
bool ServiceParser::ParseSection(const std::vector<std::string>& args,
std::string* err) {
// 判断Service是否有name和可执行程序
if (args.size() < 3) {
*err = "services must have a name and a program";
return false;
}
const std::string& name = args[1];
if (!IsValidName(name)) {
*err = StringPrintf("invalid service name '%s'", name.c_str());
return false;
}
std::vector<std::string> str_args(args.begin() + 2, args.end());
// 1
service_ = std::make_unique<Service>(name, str_args);
return true;
}
bool ServiceParser::ParseLineSection(const std::vector<std::string>& args,
const std::string& filename, int line,
std::string* err) const {
// 2
return service_ ? service_->ParseLine(args, err) : false;
}
void ServiceParser::EndSection() {
if (service_) {
// 3
ServiceManager::GetInstance().AddService(std::move(service_));
}
}
void ServiceManager::AddService(std::unique_ptr<Service> service) {
Service* old_service = FindServiceByName(service->name());
if (old_service) {
ERROR("ignored duplicate definition of service '%s'",
service->name().c_str());
return;
}
services_.emplace_back(std::move(service));//1
}
- 1、先使用ParseSection()方法根据参数创建出一个Service对象。
- 2、再使用ParseLineSection()方法解析Service语句中的每一个子项,将其中的内容添加到Service对象中。
- 3、然后,在解析完所有数据后,会调用EndSection函数,内部会执行ServiceManager的AddService函数,最终将Service对象加入vector类型的Service链表中。
init启动Zygote流程?
先看到init.rc的这部分配置代码:
...
on nonencrypted
exec - root -- /system/bin/update_verifier nonencrypted
// 1
class_start main
class_start late_start
...
1、使用class_start这个COMMAND去启动Zygote。其中class_start对应do_class_start()函数。
static Result<Success> do_class_start(const BuiltinArguments& args) {
// Starting a class does not start services which are explicitly disabled.
// They must be started individually.
for (const auto& service : ServiceList::GetInstance()) {
if (service->classnames().count(args[1])) {
// 2
if (auto result = service->StartIfNotDisabled(); !result) {
LOG(ERROR) << "Could not start service'" << service->name()
<< "' as part of class '" << args[1] << "': " << result.error();
}
}
}
return Success();
}
2、在system/core/init/builtins.cpp的do_class_start()函数中会遍历前面的Vector类型的Service链表,找到classname为main的Zygote,并调用system/core/init/service.cpp中的startIfNotDisabled()函数。
bool Service::StartIfNotDisabled() {
if (!(flags_ & SVC_DISABLED)) {
return Start();
} else {
flags_ |= SVC_DISABLED_START;
}
return Success();
}
3、如果Service没有再其对应的rc文件中设置disabled选项,则会调用Start()启动该Service。
bool Service::Start() {
...
if (flags_ & SVC_RUNNING) {
if ((flags_ & SVC_ONESHOT) && disabled) {
flags_ |= SVC_RESTART;
}
// 如果不是一个错误,尝试去启动一个已经启动的服务
return Success();
}
...
// 判断需要启动的Service的对应的执行文件是否存在,不存在则不启动该Service
struct stat sb;
if (stat(args_[0].c_str(), &sb) == -1) {
flags_ |= SVC_DISABLED;
return ErrnoError() << "Cannot find '" << args_[0] << "'";
}
...
// fork函数创建子进程
pid_t pid = fork();
// 运行在子进程中
if (pid == 0) {
umask(077);
...
// 在ExpandArgsAndExecv函数里进行了参数装配并使用了execve()执行程序
if (!ExpandArgsAndExecv(args_)) {
PLOG(ERROR) << "cannot execve('" << args_[0] << "')";
}
_exit(127);
}
...
return true;
}
static bool ExpandArgsAndExecv(cons std::vector<std::string>& args) {
std::vector<std::string> expanded_args;
std::vector<char*> c_strings;
expanded_args.resize(args.size());
c_strings.push_back(const_cast<char*>(args[0].data()));
for (std::size_t i = 1; i < args.size(); ++i) {
if (!expand_props(args[i], &expanded_args[i])) {
LOG(FATAL) << args[0] << ": cannot expand '" << args[i] << "'";
}
c_strings.push_back(expanded_args[i].data());
}
c_strings.push_back(nullptr);
// 最终通过execve执行程序
return execv(c_strings[0], c_strings.data()) == 0;
}
4、在Start()函数中,如果Service已经运行,则不再启动。如果没有,则使用fork()函数创建子进程,并返回pid值。当pid为0时,则说明当前代码逻辑在子进程中运行,最然后会调用execve()函数去启动子进程,并进入该Service的main函数中,如果该Service是Zygote,则会执行Zygote的main函数。(对应frameworks/base/cmds/app_process/app_main.cpp中的main()函数)
int main(int argc, char* const argv[])
{
...
if (zygote) {
runtime.start("com.android.internal.os.ZygoteInit", args, zygote);
} else if (className) {
runtime.start("com.android.internal.os.RuntimeInit", args, zygote);
} else {
fprintf(stderr, "Error: no class name or --zygote supplied.\n");
app_usage();
LOG_ALWAYS_FATAL("app_process: no class name or --zygote supplied.");
}
}
5、最后,调用runtime的start函数启动Zygote。
五、总结
经过以上的分析,init进程的启动过程主要分为以下三部:
- 1、创建和挂载启动所需的文件目录。
- 2、初始化和启动属性服务。
- 3、解析init.rc配置文件并启动Zygote进程。
下篇,将会继续为大家讲解Android系统启动流程中的Zygote进程和SystemService启动过程,敬请期待~
参考链接:
1、Android V9.0.0 源码
2、Android进阶解密第二章
赞赏
如果这个库对您有很大帮助,您愿意支持这个项目的进一步开发和这个项目的持续维护。你可以扫描下面的二维码,让我喝一杯咖啡或啤酒。非常感谢您的捐赠。谢谢!


Contanct Me
● 微信:
欢迎关注我的微信:
bcce5360
● 微信群:
微信群如果不能扫码加入,麻烦大家想进微信群的朋友们,加我微信拉你进群。

● QQ群:
2千人QQ群,Awesome-Android学习交流群,QQ群号:959936182, 欢迎大家加入~
About me
Email: chao.qu521@gmail.com
Blog: https://jsonchao.github.io/
掘金: https://juejin.im/user/5a3ba9375188252bca050ade
